



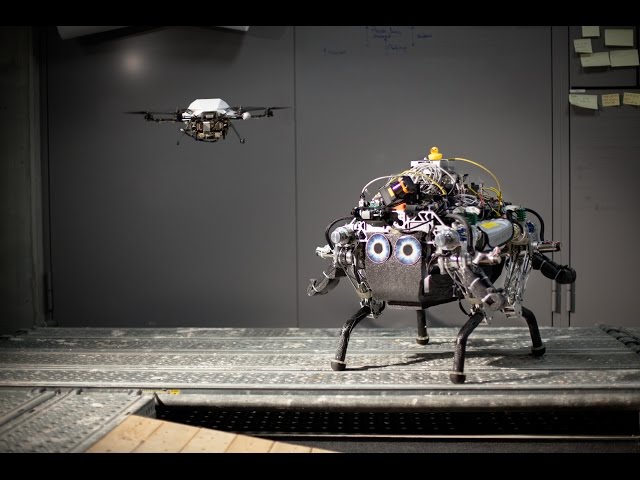
Беспилотные летательные аппараты широко применяются для составления топографических карт, которыми пользуются люди. Специалисты научно-исследовательского института ЕТН (Цюрих, Швейцария) пошли дальше. Они использовали летающий дрон для прокладки маршрута шагающему роботу.
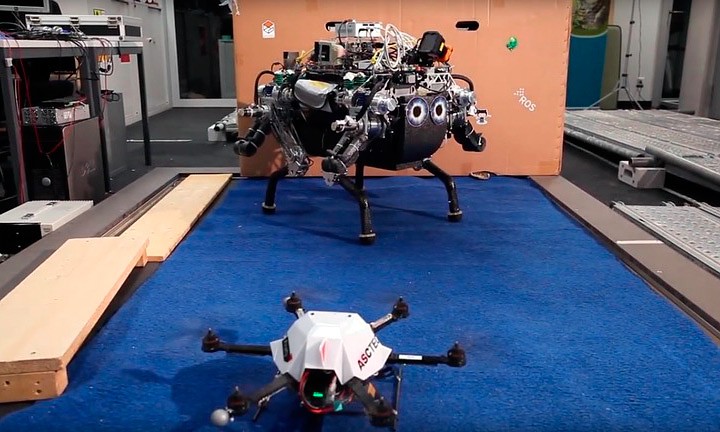
Эксперимент проводился в комнате с искусственно созданными препятствиями и разными типами поверхности. Исследователями была назначена начальная и конечная точки маршрута, который предстояло преодолеть шагающему роботу.
Использую полученные летающим роботом данные с видеокамеры и датчиков, «наземный» робот составил трехмерную карту местности высокого разрешения, фиксируя и анализируя потенциально сложные участки. Выделялись такие параметры, как крутизна, шероховатость поверхности и высота ступеней. Затем была рассчитана оптимальная траектория пути.
Медленно передвигаясь на намеченному пути, шагающий робот продолжал корректировать маршрут, используя актуальные данные уже со своих бортовых датчиков. В итоге робот достиг конечной точки без какого-либо вмешательства человека.
Полученный опыт пригодится для разработки роботов, умеющих объединять усилия для выполнения сложных специфических задач.
Беспилотные летательные аппараты широко применяются для составления топографических карт, которыми пользуются люди. Специалисты научно-исследовательского института ЕТН (Цюрих, Швейцария) пошли дальше. Они использовали летающий дрон для прокладки маршрута шагающему роботу.
Эксперимент проводился в комнате с искусственно созданными препятствиями и разными типами поверхности. Исследователями была назначена начальная и конечная точки маршрута, который предстояло преодолеть шагающему роботу.
Использую полученные летающим роботом данные с видеокамеры и датчиков, «наземный» робот составил трехмерную карту местности высокого разрешения, фиксируя и анализируя потенциально сложные участки. Выделялись такие параметры, как крутизна, шероховатость поверхности и высота ступеней. Затем была рассчитана оптимальная траектория пути.
Медленно передвигаясь на намеченному пути, шагающий робот продолжал корректировать маршрут, используя актуальные данные уже со своих бортовых датчиков. В итоге робот достиг конечной точки без какого-либо вмешательства человека.
Полученный опыт пригодится для разработки роботов, умеющих объединять усилия для выполнения сложных специфических задач.







{kind=link}
{kind=link}